8. Demonstrator and showcase
This chapter presents a lightweight demonstrator designed to showcase the value of MICOFE capsules for graphical applications (LVGL) running on SO3 alongside a Linux-based “critical” environment. The goal is not to benchmark performance but to illustrate isolation, composability (multiple capsules on the same target), and portability (the same capsule across heterogeneous Arm platforms).
Two complementary demonstration scenarios are implemented:
Scenario 1 — Multi-capsule composition on a single target: multiple SO3 capsules, each running a distinct LVGL application, execute on the same hardware while Linux continues to run the “critical” user interface and services.
Scenario 2 — Portability across heterogeneous platforms: the same capsule image runs unmodified on different Arm targets (e.g., Raspberry Pi 4, Toradex Verdin iMX8MP) and on an emulated platform (QEMU/virt64), demonstrating a consistent UI across boards.
8.1. Demonstrator principles
The demonstrator is intentionally built on top of the core deliverables described in the previous chapters: a SO3 user space able to run standard applications with MUSL (without patching MUSL), and the kernel-side syscall compatibility required by typical LVGL-based UIs. The showcase therefore focuses on the end-to-end experience: building a capsule, launching it next to Linux, and validating that the UI behaves consistently across targets.
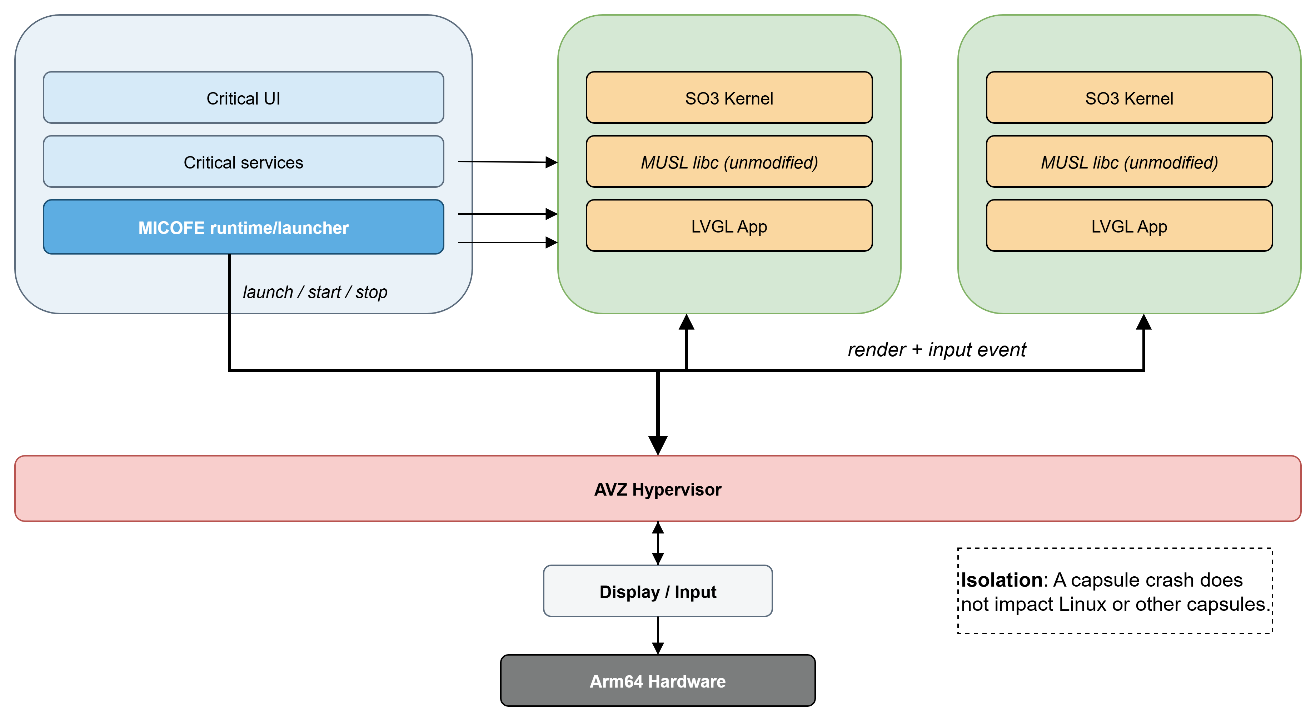
Fig. 8.1 Showcase architecture (Linux “critical UI” + multiple SO3 capsules)
8.2. Demonstrator setup and prerequisites
This section summarizes the environment used to run the showcase and the artifacts required to reproduce it.
Targets: Raspberry Pi 4 (Arm64), Toradex Verdin iMX8MP (Arm64), and QEMU/virt64 for emulation-based runs.
Host environment: a Linux development machine with the SO3 build environment and the capsule build tooling.
Software stack: Linux used as the “critical” environment; SO3 as the capsule OS; MUSL as the system libc inside capsules; LVGL applications as the showcased workloads.
Artifacts: one or more capsule images that embed (1) the SO3 user space, (2) an LVGL application, and (3) its configuration assets (themes, fonts, input mapping, etc.).
8.3. Scenario 1 — Multi-capsule composition next to a Linux “critical UI”
This scenario demonstrates how MICOFE can support the deployment of graphical applications that interact with a Linux-based critical environment, while keeping those applications isolated inside SO3 capsules. The key message is composability: multiple independent UI capsules can coexist on the same target, with Linux retaining control over the critical interface and any safety- or security-sensitive services.
Prepare capsules: build at least two capsules, each embedding a different LVGL application (e.g., “Dashboard” and “Settings”).
Boot the platform: start Linux as the base environment and bring up the critical UI (or a representative placeholder UI) on the main display.
Launch capsules: start the SO3 capsules from Linux using the MICOFE runtime/launcher.
Validate isolation: intentionally stop or restart one capsule and verify that the Linux critical UI and the other capsule keep running.
Validate interaction contract: verify that the capsules only access shared resources through explicit, controlled interfaces (e.g., a device, a service endpoint, or a pre-defined IPC mechanism), rather than ad-hoc shared state.
Success criteria. The scenario is considered successful when:
Each capsule UI starts reliably and renders correctly using LVGL.
A failure (crash/kill) of one capsule does not affect Linux or other capsules.
The capsule’s behavior matches expectations for a MUSL-based environment (no MUSL patching required, and missing syscalls fail cleanly with
ENOSYSwhere applicable).Startup/shutdown cycles are repeatable without leaving the system in an inconsistent state (e.g., resources released, no deadlocks in basic futex-based synchronization).
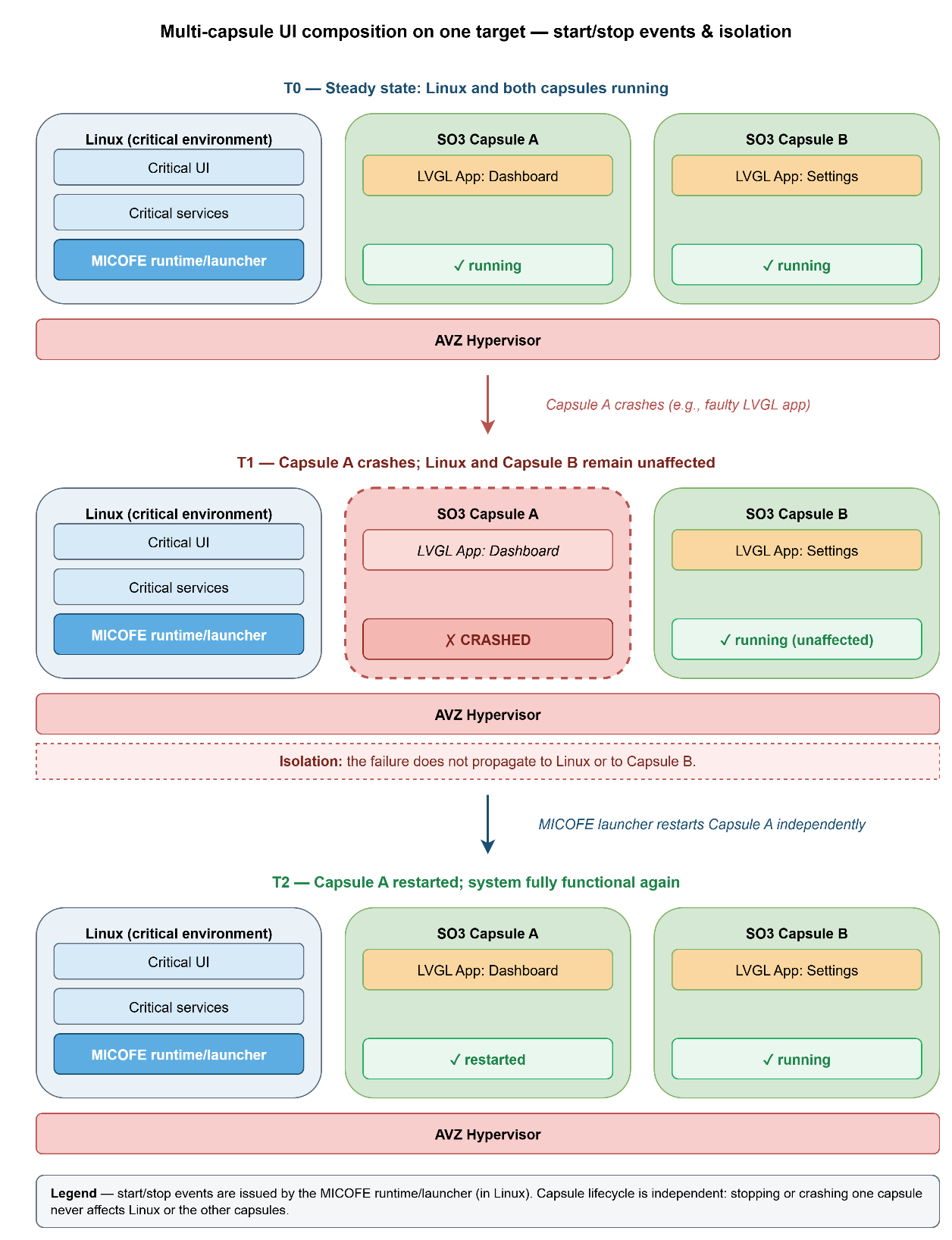
Fig. 8.2 Multi-capsule UI composition on one target
8.4. Scenario 2 — Capsule portability across boards and emulation
This scenario demonstrates platform heterogeneity: the same capsule image can be deployed across different Arm64 systems (and in QEMU) while providing a consistent UI. The intent is to show that the capsule encapsulates its user space (MUSL + application) and that the kernel interface exposed by SO3 remains sufficiently stable across targets.
Select a reference capsule: choose one LVGL capsule (e.g., “Dashboard”) as the portability baseline.
Run on Raspberry Pi 4: deploy the capsule and confirm correct rendering and input handling.
Run on Verdin iMX8MP: deploy the exact same capsule image and confirm identical functional behavior (layout, fonts, navigation).
Run on QEMU/virt64: boot an emulated target and run the capsule to validate developer-friendly workflows (CI, regression tests, headless automation where applicable).
Compare outputs: record a small set of checks (startup logs, a few screenshots, and basic UI interactions) and verify equivalence across the three environments.
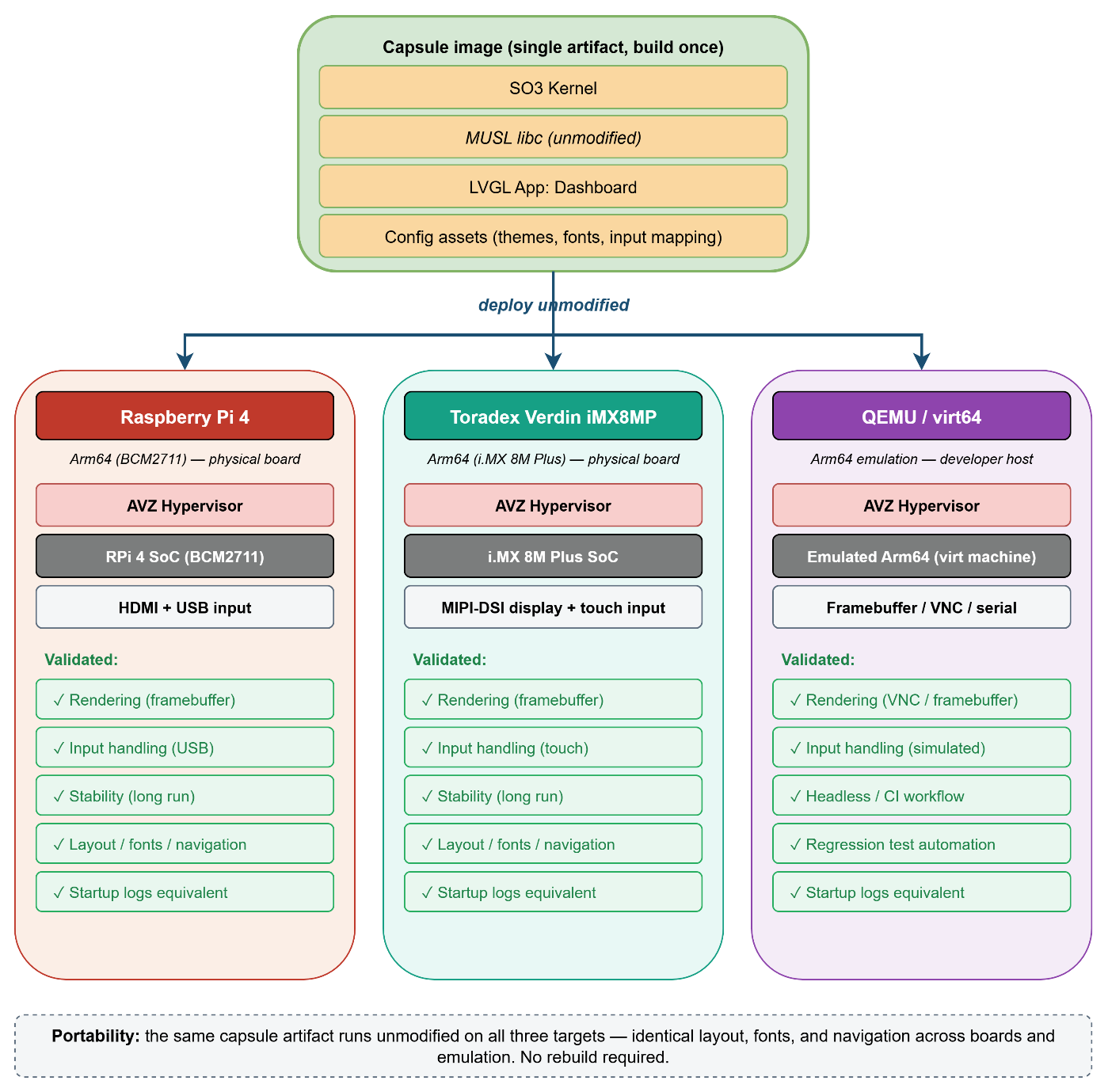
Fig. 8.3 Portability matrix (same capsule across targets)
8.5. Discussion, limitations, and next steps
Together, the two scenarios provide an end-user-oriented validation of the project’s technical choices. Scenario 1 makes the isolation and composition benefits tangible (multiple independent UIs running in parallel next to Linux), while Scenario 2 demonstrates that capsules are a practical distribution format across heterogeneous targets.
8.5.1. Observed/expected limitations
Based on the current SO3 syscall surface and MUSL alignment (see MUSL libc support), the demonstrator intentionally stays within a “baseline application” envelope:
Not all Linux flags/options are supported for every syscall (e.g., reduced
mmapflags; limitedcloneflag set; reducedfutexoperations). The showcase therefore avoids advanced behaviors that rely on those options.Unimplemented syscalls return
ENOSYS; the demonstrator is designed so such cases are either not triggered or are easy to diagnose in logs.The demonstrator focuses on functionality and integration rather than on performance or real-time guarantees.
8.5.2. Next steps
Building on the current demonstrator and the MUSL-based runtime, several extensions are natural candidates for future work. The two most prominent are native Rust support on top of SO3 and broader GPU coverage for graphical capsules.
Rust support. Completing Rust support so that capsules can host applications written in both C++ and Rust on top of the same MUSL-aligned runtime. This will require a dedicated Rust toolchain targeting SO3, including a stable mapping between Rust’s standard library expectations and the existing syscall surface, as well as packaging guidelines for Rust-based capsules. In the medium term, Rust support will make it easier to explore memory-safe system components and higher-level services inside capsules.
Broader GPU coverage. The current demonstrator focuses on a specific class of GPUs and display pipelines. A natural evolution is to extend the GPU abstraction layer so that LVGL-based capsules can be reused across a wider range of SoCs and boards without reworking the application logic. This involves separating board-specific display integration (framebuffer, composition, input routing) from the capsule-visible interfaces, and validating the approach on additional GPU families and display controllers.
Transversal improvements. Hardening the Linux-capsule interaction contract by documenting and implementing a small, well-defined set of services for configuration, monitoring, and logging, usable consistently across capsules and targets. Another is to industrialize the current demonstrator into a reusable reference platform, with scripted deployment, regression tests, and example capsules that can serve as templates for future industrial or academic projects.